MEMS 即微机电系统,集微型传感器、执行器、信号处理与控制电路、接口电路、通信和电源于一体,是随着半导体集成电路微细加工技术和超精密机械加工技术的发展而发展起来的。MEMS 惯性传感器主要包括 MEMS 陀螺仪、MEMS 加速度计、MEMS 磁力计及 MEMS-IMU 等五种。本次,我们有幸邀请到了丁徐锴老师为我们介绍MEMS惯性传感器的一些相关内容、应用和发展前景,以及对我们本科生在培养科研素养方面的期待。
01 人物介绍

丁徐锴
博士,讲师(助理研究员),新葡的京集团350vip8888首页-微惯性仪表与先进导航技术教育部重点实验室。
2011-2018 硕博连读 新葡的京集团350vip8888首页-新葡的京集团350vip8888首页;
2015-2016 联合培养 Georgia Institute of Technology - School of Electrical and Computer Engineering;
2007-2011 本科 新葡的京集团350vip8888首页-新葡的京集团350vip8888首页.
研究方向:MEMS惯性传感器(陀螺仪、加速度计)、MEMS压力传感器等谐振式MEMS传感器。
研究兴趣:MEMS惯性传感器原理、微弱信号检测、模数混合电路系统设计、控制理论等方向。
科研工作:从事MEMS结构的测试分析、控制系统设计、微弱信号提取、传感器数据分析等工作,针对谐振子运动分析、传感器闭环设计、误差分析等领域具有深入研究。
SCI期刊论文
X. Ding, J. Jia, Y. Gao, H. Li; “Mechanical and Electrical Noise in Sense Channel of MEMS Vibratory Gyroscopes”, Sensors, 2017
X. Ding, K. Zhu, H. Li; “A Switch-Bridge-Based Readout Circuit for Differential Capacitance Measurement in MEMS Resonators”, IEEE Sensors Journal, 2017
X. Ding, H. Li, K. Zhu, Y. Zhang; “A Force Rebalanced Micro-Gyroscope Driven by Voltages Oscillating at Half of Structure’s Resonant Frequency”, IEEE Sensors Journal, 2016
X. Ding, H. Li, Y. Ni, P. Sang; “Analysis of Frequency Response and Scale-Factor of Tuning Fork Micro Gyroscope Operating at Atmospheric Pressure”, Sensors, 2015
X. Ding, H. Li, Y. Ni, A. Shao; “Control Methods for Drive Mode of MEMS Vibratory Gyroscope with Spring Hardening Nonlinearity”, 中国惯性技术学报, 2015
02 采访内容
Q1 丁老师您好,请问MEMS传感器相较于其他传感器而言优势主要体现在什么地方呢?又是如何体现出来的呢?
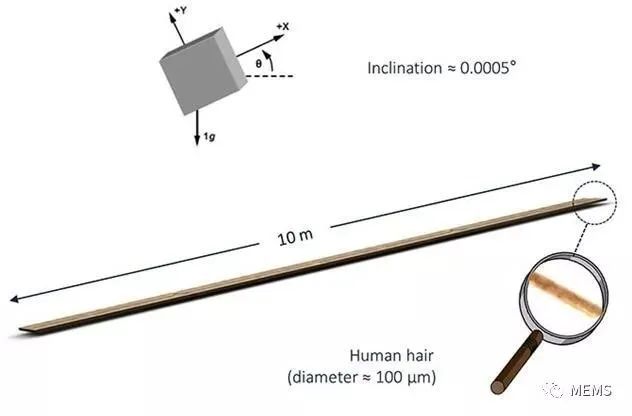
丁:MEMS传感器在体积、功耗、成本等方面,相比于传统传感器具有较大的优势,特别其可以利用半导体工艺进行批量生产的特点,可以极大地降低体积与成本。举个简单的例子,在MEMS惯性传感器被应用之前,现在非常流行的消费级四轴飞行器是很难实现的,因为其中的姿态控制必须使用相应的惯性传感器。而传统的惯性传感器,特别是陀螺仪,受限于实现原理,他们体积庞大,成本高昂,在消费级产品中难以适用。但在MEMS惯性传感器得以成功商用化之后,此类消费级飞行器如雨后春笋般蓬勃发展。
Q2 了解了您主要的科研方向,想请问一下谐振子在MEMS惯性传感器的研究中是一个怎样的存在?又应该如何针对谐振子进行运动分析呢?
丁:谐振子是MEMS惯性传感器的一个基本,也是最重要的,功能部件。相对于振动式陀螺仪而言,其原理要求必须维持一个恒定幅度的稳定振动,因此研究如何精确地控制谐振子是至关重要的。对于加速度计而言,谐振子并非是必须的,但我们仍可以把谐振子设计在加速度计的检测环节之中,形成一个频率输出型的加速度计,进而可以提高测量灵敏度。频率,是目前我们在器件小型化的同时,能够保持高精度测量的一个重要参量。因此,谐振式的传感器往往能具有极高精度的潜力。
针对谐振子的运动分析其实并不复杂。针对最简单的情况,其实就是同学们在信号与系统中熟悉的二阶传递函数的特性。利用传递函数来分析谐振子运动时,输入信号就是力,输出信号就是位移,而其运动的瞬态与稳态响应信息,也均包含在传递函数中。在对谐振子进行相关的控制时,也大量用到了同学们已经学过的自动控制原理以及相关的电路知识。但通过进一步的研究,我们就会发现谐振子的振动其实并非是线性的,谐振子的恢复力与位移并非简单的线性关系,而是存在各阶非线性。在我们的实验过程中,此类现象也非常普遍。要研究此类问题,就需要相对较复杂的数学知识,比如庞加莱摄动法。

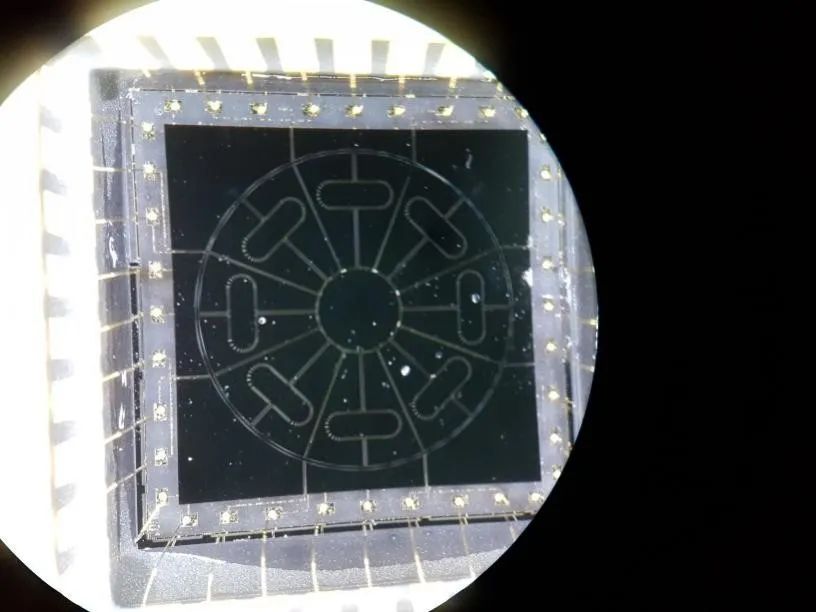
谐振环陀螺发展历程
Q3有看到您不久前发明了一种全对称微机电陀螺仪三轴角速度测量系统并已获得授权,想请问应该如何提高MEMS惯性传感器的精度及降低它的功耗呢?
丁:这个系统并不能降低功耗,但确实可以提升测量精度。它的具体原理涉及全对称微机电陀螺仪的一个特征,就是在正交改变陀螺仪驱动方向的时候,传感器的零偏会变号,而检测的有效输出则是不变的,因此我们可以构建一个包含四个轴对称陀螺仪的系统,轮流交换其中的一个陀螺仪的驱动方向,就可以实现对三轴角速度测量的自校准,抑制零偏漂移的影响。
Q4 请问MEMS惯性传感器在我们的生活中主要应用在了哪里呢?未来的发展前景怎么样呢?如果对MEMS惯性传感器相关感兴趣的话,在本科阶段我们应该着重注意哪些方面的学习呢?
丁:从前面的问题中我们也能看到MEMS惯性传感器在我们生活中的重要应用。除了消费级的四旋翼无人机外,我们平日时时接触最多的就是我们的智能手机了,这种高度集成的MEMS传感器能够给我们提供足够的运动信息,可以应用于体感检测、相机防抖等功能。至于消费级MEMS惯性传感器未来发展的话,我个人认为,一个重要的应用就是能够为我们提供诸如室内、地下等无卫星信号时的惯性导航。
如果同学们对MEMS传感器感兴趣的话,我们需要更加注重信号与系统、信号分析与处理、自动控制原理等基础理论课程的学习,同时也要注意培养模拟电路、数字电路的能力。前者是理论方法,帮助构建我们的知识体系;后者是工具,帮助我们实现理论设计的方法。当然还有一个能力我认为也很重要,但并不属于哪一门具体的课程,那就是对实验现象要有敏锐的洞察力,这能帮助我们发现问题,并找到对应的解决办法。

03 总结
丁徐锴老师在访谈中解答了我们MEMS惯性传感器的相关问题,也希望我们本科生能在现阶段多重视基础学科以及专业课的学习,培养科研意识和科研习惯,为以后成为科研人才打下坚实基础。
今日份访谈结束,精彩仍在继续。让我们一同期待孙立博老师的访谈之“仪科知多少”(第十五期)|构架的现实——基于SSD模型的人脸检测与头部姿态估计融合算法吧!
来源|东大仪科公众号